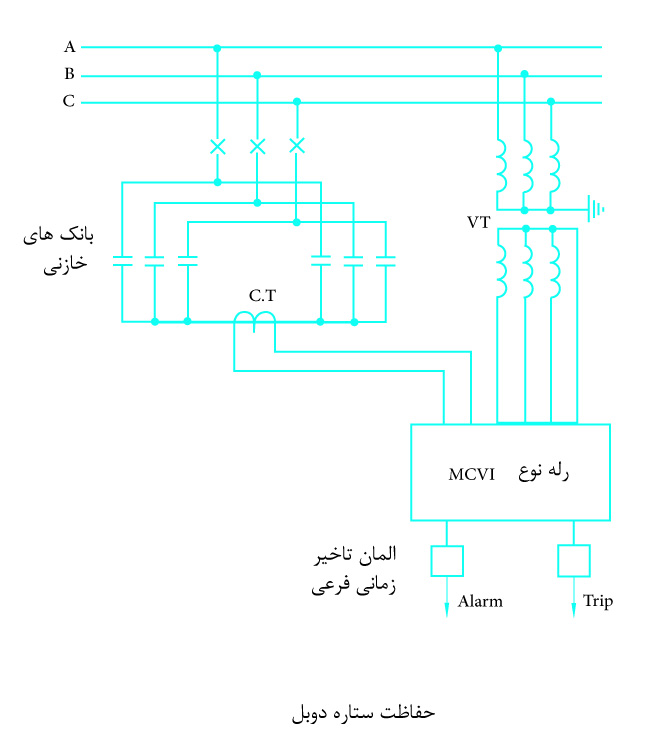
شرایط تعیین کننده ای که بر انتخاب حفاظت مورد نیاز الکتروموتور، تحمیل می شوند را می توان به دو دسته کلی شرایط خارجی و خطاهای داخلی تقسیم کرد. در این دسته بندی پارامترهای خاصی چون تک فازشدگی، راه اندازی با توالی معکوس فاز، خروج از سنکرونیزم برای الکتروموتورهای سنکرون و ... موثر هستند. خطاهای داخلی، خطاهایی هستند که مربوط به الکتروموتور و متعلقات مکانیکی آن می باشند در صورتی که برای شرایط خارجی، تغذیه اعمالی به الکتروموتور و مسائل تابعه آن تعیین کننده هستند.
الف) خرابی بلبرینگ ها
یکی از عوامل مهمی که باعث صدمه دیدن الکتروموتورها می شود، خرابی بلبرینگ هاست. وظیفه بلبرینگ ها در سازه های مکانیکی و همچنین در الکتروموتورها کاهش اصطکاک می باشد و طبیعی است که با خرابی بلبرینگ ها این وظیفه به خوبی انجام نشده و حتی باعث کندی حرکت نیز می گردد. خرابی بلبرینگ ها معمولا زود به زود روی می دهد و باعث می شود که به هنگام درگیر شدن بلبرینگ خراب، الکتروموتور به آهستگی، با بار زیاد حرکت کرده و یا ایست نماید. بنابراین شانس کمی وجود دارد که حفاظت قبل از خرابی کامل بلبرینگ ها دستور قطع صادر نماید. بهتر است حفاظت بکار رفته به گونه ای انتخاب شود که در اثر خرابی بلبرینگ ها و عبور جریان زیاد، آسیبی به الکتروموتور وارد نشود. بلبرینگ ها و بخش های ضد اصطکاک تابعه معمولا در الکتروموتورهای کوچک تا 500hp وجود دارند.
در الکتروموتورهای بزرگ معمولا خرابی sleave دیده می شود. این خرابی می تواند در اثر بروز اشکال در روغن کاری الکتروموتور به وقوع بپیوندد. معمولا انتظار می رود که در اثر خرابی سیستم روغن و یا فقدان روغن، بلبرینگ ها طی مدت یک یا دو دقیقه از کار بیفتد و افزایشی در جریان الکتروموتور روی دهد. بنابراین اگر از رله های معمول حرارتی اضافه بار استفاده شود و مشخصه آن با مشخصه کارکرد الکتروموتور تطبیق داشته باشد، حفاظت کافی برای بلبرینگ ها فراهم نمی شود اما رله حرارتی فوق می تواند با سرعت خوبی الکتروموتور را در مقابل خرابی بیش از اندازه حفاظت نماید.
ب) گرم شدن سیم بندی الکتروموتور
اکثریت خرابی های سیم بندی الکتروموتور مستقیم و یا غیر مستقیم به دارای اضافه بار شدن الکتروموتور برمی گردد. این اضافه بار شدن الکتروموتور، در الکتروموتور های کوچک برای مدت کم نیز می تواند مخرب باشد. کارکردن الکتروموتور تحت شرایط عدم تعادل ولتاژ تغذیه، قطع شدن یک فاز و ... باعث ایجاد خرابی و زوال در عایق سیم بندی الکتروموتور شده تا جایی که بالاخره یک اتصالی در آن بوجود می آید.
ج) اضافه بار
تنوع گسترده در وظایف الکتروموتورها و طراحی آن ها باعث می شود که تمام مشخصات و مقادیر نامی الکتروموتور در کاربردهای آن رعایت نشود. در دو مثال زیر دو نوع کاربرد (یا وظیفه) در الکتروموتورها که در نتیجه باعث می شود حفاظت آن ها نیز متفاوت باشد. توضیح داده می شود.
-الکتروموتوری که برای بار متغیر و لرزان استفاده می شود. اگر خارج شدن الکتروموتور باعث توقف و تعطیلی یک فرایند گردد، لازم است که خروج الکتروموتور از چرخه فرایند هرچه ممکن است دیرتر صورت گیرد. معمولا این مقصود با تنظیم جریانی بالاتر الکتروموتور فراهم می آید.
-الکتروموتورهایی که به بارهای یکنواخت متصل هستند. در این بارها، به محض ایجاد اضافه بار در اثر یک خطای مکانیکی، الکتروموتور باید سریعا خارج گردد.
عموما تمام اطلاعاتی که برای تنظیم دقیق رله اضافه بار مورد نیاز است. در الکتروموتورهای مختلف موجود نمی باشد. در این صورت باید تنها حفاظت هایی را در نظر گرفت که تا حد امکان هماهنگ با مشخصه الکتروموتور باشد. همچنین باید دقت شود که زمان لازم برای راه اندازی استارت الکتروموتور از طریق تنظیم زمانی رله فراهم گردد.
د) جریان های الکتروموتور در شرایط راه اندازی
جریان های راه اندازی الکتروموتور، مقادیر مجاز و مدت عبور این جریان ها و مقادیر مجاز جریان الکتروموتور در حالت توقف، بیشترین فاکتورهایی هستند که برای حفاظت اضافه بار الکتروموتور مد نظر قرار می گیرند.
معمولا فرض می شود که راه اندازی ماشین ها ارتباط مستقیم با مقدار جریان داشته و با افزایش سرعت الکتروموتور، جریان الکتروموتور نیز به صورت خطی با آن کاهش می یابد. چنین فرضی در حقیقت به همه ماشین ها قابل تعمیم نیست. برای طراحی های معمول، جریان راه اندازی روی مقادیر ثابت اولیه برای 80 تا 90 درصد زمان راه اندازی، تقریبا ثابت می ماند. جریان روتور (IR) برای یک الکتروموتور القایی بستگی به لغزش آن داشته و از رابطه زیر دست می آید:
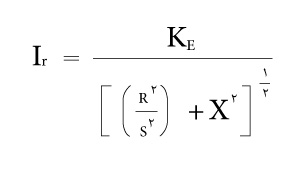
از رابطه بالا و با فرض اینکه راکتانس ماشین تقریبا 10 برابر مقاومت سیم بندی ماشین باشد، منحنی شکل زیر بدست می آید.
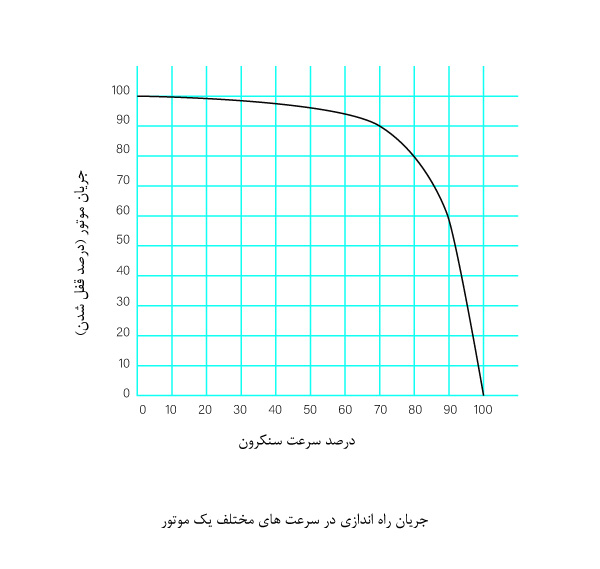
در شکل بالا ارتباط بین جریان الکتروموتور به صورت درصدی از جریان توقف و یا جریان راه اندازی و سرعت الکتروموتور به صورت درصدی از سرعت سنکرون، نشان داده شده است. معادله بالا نشان می دهد که برای الکتروموتورهایی با مقاومت کم روتور، 2(R/S) فقط در شرایطی که مقدار لغزش کوچک باشد، قابل مقایسه با X است. بنابراین همانطور که در شکل بالا نشان داده شده جریان راه انداز یا جریان الکتروموتور تا هنگامی که به سرعت نرمال خودش برسد، حدودا روی مقدار جریان راه انداز (و یا جریان الکتروموتور در حالت توقف روتور) ثابت می ماند. بنابراین هنگام محاسبه تنظیم جریانی و زمانی رله جریان زیاد و یا انتخاب فیوز مناسب برای حفاظت الکتروموتور، فرض می شود که جریان راه اندازی الکتروموتور، در تمام مدت راه اندازی آن ثابت می ماند.
ه) توقف الکتروموتور
اگر یک الکتروموتور به بار بزرگ برخورد نماید احتمال آنکه توقف نموده و یا راه اندازی نشود وجود دارد. در این صورت، جریانی از منبع تغذیه که جریان قفل شدگی روتور است از آن عبور می نماید. روشن است که تحت شرایط برای جلوگیری از آسیب دیدن الکتروموتور، باید هر چه سریع تر آن را از منبع تغذیه جدا نمود.
امکان اینکه این حالت کار نادرست، از راه اندازی (استارت) صحیح الکتروموتور توسط مقایسه جریان ها تمیز داده شود، وجود ندارد. تنها راه برای جدا کردن این دو حالت، استفاده از وسایل حفاظتی است، تا کار الکتروموتور را در حالتی که جریان قفل شدگی روتور از الکتروموتور بگذرد تشخیص دهد.
در اکثریت بارها، زمان راه اندازی الکتروموتور القایی کمتر از 10 ثانیه، در صورتی که عایق بندی الکتروموتور برای مدت بیشتر از 20 ثانیه توقف روتور، آسیب دیده و از بین می رود. بنابراین، دو حالت فوق را می توان به سادگی با مقایسه زمان عبور جریان ها از هم تمیز داد.
در شرایطی که از الکتروموتور برای بارهای خاصی استفاده می شود (مانند الکتروموتوری که باری با اینرسی زیاد راه اندازی می نماید و زمان راه اندازی طولانی تری دارد) الکتروموتور به مرز آسیب پذیری نزدیک تر شده و بنابر این ضروری است که در چنین شرایطی دقت لازم به عمل آید. در اینگونه موارد، بسته به نوع رله جریان زیادی که استفاده شده، به رله خاص دیگری که حفاظت مطلوب را برای شرایط توقف الکتروموتور فراهم نماید، نیاز است. وجود یا عدم وجود حفاظت اضافی فوق، برای حالت توقف روتور، بستگی مستقیم به زمان راه اندازی نرمال توقف مجاز دارد. بنابراین مشخصه زمان جریان رله ای که تنظیم می شود باید به گونه ای نزدیک به مشخصه الکتروموتور باشد تا برای راه اندازی و کارکرد نرمال الکتروموتور مشکلی ایجاد ننماید.
بیشترین عاملی که باعث توقف الکتروموتورهای القایی می شود از دست دادن یک فاز تغذیه است. این امر احتمالا می تواند ناشی از سوختن یکی از فیوز های سر راه الکتروموتور در اثر جریان هجومی اولیه الکتروموتور باشد.در این حالت الکتروموتور شروع به گردش کرده ولی بعد از قطع یک فاز، ساکن باقی می ماند. دو فاز شدن الکتروموتور می تواند در اثر باز شدن یک فاز تغذیه نیز صورت پذیرد. مقدار واقعی جریان کشیده شده توسط ماشین در این حالت، کمتر از حالت توقف و وجود تغذیه سه فاز و حدودا 3√ برابر جریان در حالت قفل شدگی روتور می باشد. در این حالت اگر چه جریان کمتر است ولی به دنبال این جریان زیاد، گرمای زیادی تولید شده که باعث صدمه دیدن آن سمت سیم بندی ماشین می شود.
هنگام اعمال تغذیه سه فاز متعادل به یک ماشین و تولید میدان گردان، روتور به صورت متقارن گرم نمی شود اما وقتی که ولتاژ تغذیه نامتعادل باشد(مانند قطع یک فاز)، یک میدان ضربانی در روتور القا می شود که ناشی از فلوهای ایجاد شده توسط مولفه های مثبت و منفی جریان است. این امر باعث ایجاد گرمای نامتقارن در سیم بندی روتور شده و در نهایت صدمه دیدن روتور را به دنبال خواهد داشت. بنابراین ضروری است هرچه سریعتر تغذیه از الکتروموتور برداشته شود.
و) عدم تقارن ولتاژ تغذیه
ولتاژ تغذیه یک الکتروموتور به دلایل مختلفی مانند تک فاز شدگی و یا قطع یکی از فازهای تغذیه (در اثر عوامل متعددی مانند سوختن فیوز سر راه آن) می تواند حالت عدم تعادل به خود گرفته و الکتروموتور با وجود متصل بودن به ولتاژ تغذیه، در حالت سکون قرار گیرد.
اما در بعضی موارد، با باز شدن تصادفی یک فاز تغذیه بسته به باری که الکتروموتور آن را حمل می کند، الکتروموتور می تواند به حرکت خود ادامه دهد. از جمله این موارد را می توان حالتی در نظر گرفت که یک الکتروموتور باری با اینرسی زیاد را حرکت می دهد. در نگاه اول اینگونه به نظر می آید که عدم تعادل ولتاژ تغذیه در شرایط نرمال توقف، تاثیر قابل توجهی در کارکرد الکتروموتور نمی گذارد ولی باید تاکید شود که تنها در شرایط نرمال توقف، تاثیر قابل توجهی در کارکرد الکتروموتور نمی گذارد ولی باید تاکید شود که تنها عدم تعادل ولتاژ مهم نیست، بلکه جریان توالی منفی بزرگی در اثر عدم تعادل تغذیه به ماشین سرازیر می شود مهم بوده و باعث گرم شدن نابجای الکتروموتور و در نهایت صدمه دیدن آن می گردد.
حالتی که یک خط از تغذیه سه فاز یک الکتروموتور القایی قطع می گردد، معمولا به عنوان بدترین حالت عدم تعادل و ایجاد گرما در سیم بندی در نظر گرفته می شود. (در بیشتر موارد عملی عدم تعادل ولتاژ، این فرض صحیح بوده ولی ضرورتا چنین نیست).
مشاهده می شود که امپدانس توالی مثبت و منفی جریان در شبکه فوق به صورت سری قرار می گیرند و در این حالت خاص، دامنه مولفه های توالی مثبت و منفی جریان باید برابر باشند.
منبع : کتاب حفاظت و رله ها / تالیف : دکتر حسین عسکریان ابیانه (استاد دانشگاه صنعتی امیر کبیر (پلی تکنیک تهران))